Reference Frames
Frames
The preferred way to retrieve a frame is by using the get_frame() function.
- beyond.frames.frames.get_frame(frame)
Frame factory
- Parameters:
frame (str) – name of the desired frame
- Returns:
the object representing the frame demanded
- Return type:
- Raises:
UnknownFrameError –
However, in some cases this is done for you. See StateVector.frame for example.
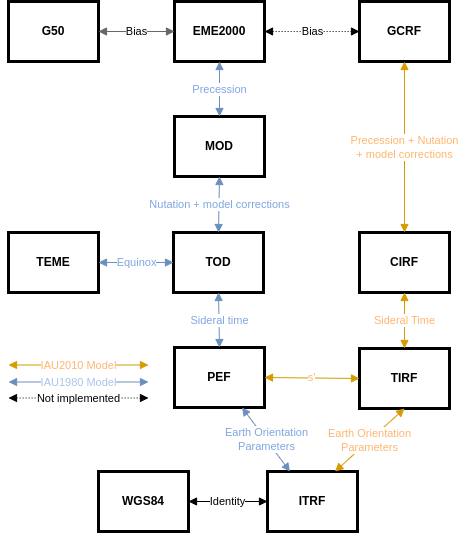
CIO Based Frames
- beyond.frames.frames.GCRF = <Frame 'GCRF'>
Geocentric Celestial Reference Frame
- beyond.frames.frames.CIRF = <Frame 'CIRF'>
Celestial Intermediate Reference Frame
- beyond.frames.frames.TIRF = <Frame 'TIRF'>
Terrestrial intermediate Reference Frame
- beyond.frames.frames.ITRF = <Frame 'ITRF'>
International Terrestrial Reference Frame
IAU1980 based Frames
- beyond.frames.frames.EME2000 = <Frame 'EME2000'>
EME2000 inertial frame (also known a J2000)
- beyond.frames.frames.MOD = <Frame 'MOD'>
Mean (Equator) of Date
- beyond.frames.frames.TOD = <Frame 'TOD'>
True (Equator) of Date
- beyond.frames.frames.PEF = <Frame 'PEF'>
Pseudo Earth Fixed
- beyond.frames.frames.TEME = <Frame 'TEME'>
True Equator Mean Equinox
Others
- beyond.frames.frames.G50 = <Frame 'G50'>
Gamma 50 Reference Frame
- beyond.frames.frames.WGS84 = <Frame 'ITRF'>
World Geodetic System 1984
This is equivalent to ITRF, with an error below the centimeter
Local Orbital Reference Frame
It is possible to attach a frame to a moving object by calling the method
Orbit.as_frame() or
Ephem.as_frame().
Both are a simple shortcut to the orbit2frame() function.
- beyond.frames.frames.orbit2frame(name, ref_orbit, orientation=None, parent=<Frame 'EME2000'>, exists_warning=True)
Create a frame based on a Orbit or Ephem object.
- Parameters:
name (str) – Name to give the created frame
orientation (str) – Orientation of the created frame. If orientation is
None, the new frame will keep the orientation of the reference frame of the Orbit and move along with the orbit. Other acceptable values are"QSW","TNW"or"LVLH".parent (Frame) – Inertial frame to which to attach the LOF
exists_warning (bool) – Disable the warning when creating a frame with an already taken name by setting this value to False
- Return type:
See
localfor informations regarding orientations.
Local orbital reference frame
- beyond.frames.local.to_local(frame, orbit, expanded=True)
Provide the transformation matrix to convert a vector from an inertial frame to a local orbital reference frame of choice
- Parameters:
frame (str) – Name of the local orbital frame (‘QSW’ or ‘TNW’)
orbit (List[float]) – cartesian coordinates (length 6)
expanded (bool) – If
Truethe returned matrix is 6x6, 3x3 otherwise
- Returns:
Transformation matrix
- Return type:
numpy.ndarray
>>> delta_tnw = [1, 0, 0] >>> p = [-6142438.668, 3492467.560, -25767.25680] >>> v = [505.8479685, 942.7809215, 7435.922231] >>> pv = p + v >>> mat = to_local("TNW", pv, expanded=False).T >>> delta_inert = mat @ delta_tnw >>> all(delta_inert == v / norm(v)) True
- beyond.frames.local.to_lvlh(orbit)
In the LVLH Local Orbital Reference Frame, z is oriented opposite the position vector, y opposite the angular momentum, and x complete the frame.
- Parameters:
orbit (list) – Array of length 6
- Returns:
matrix to convert from inertial frame to LVLH
- Return type:
numpy.ndarray
>>> delta_lvlh = [0, 0, -1] >>> p = [-6142438.668, 3492467.560, -25767.25680] >>> v = [505.8479685, 942.7809215, 7435.922231] >>> pv = p + v >>> mat = to_lvlh(pv).T >>> delta_inert = mat @ delta_lvlh >>> all(delta_inert == p / norm(p)) True

- beyond.frames.local.to_qsw(orbit)
In the QSW Local Orbital Reference Frame, x is oriented along the position vector, z along the angular momentum, and y complete the frame.
The frame is sometimes also called RSW (where R stands for radial).
- Parameters:
orbit (list) – Array of length 6
- Returns:
matrix to convert from inertial frame to QSW
- Return type:
numpy.ndarray
>>> delta_qsw = [1, 0, 0] >>> p = [-6142438.668, 3492467.560, -25767.25680] >>> v = [505.8479685, 942.7809215, 7435.922231] >>> pv = p + v >>> mat = to_qsw(pv).T >>> delta_inert = mat @ delta_qsw >>> all(delta_inert == p / norm(p)) True

- beyond.frames.local.to_tnw(orbit)
In the TNW Local Orbital Reference Frame, x is oriented along the velocity vector, z along the angular momentum, and y complete the frame.
- Parameters:
orbit (list) – Array of length 6
- Returns:
matrix to convert from inertial frame to TNW.
- Return type:
numpy.ndarray
>>> delta_tnw = [1, 0, 0] >>> p = [-6142438.668, 3492467.560, -25767.25680] >>> v = [505.8479685, 942.7809215, 7435.922231] >>> pv = p + v >>> mat = to_tnw(pv).T >>> delta_inert = mat @ delta_tnw >>> all(delta_inert == v / norm(v)) True

- beyond.frames.frames.Hill = <HillFrame 'HillQSW'>
Hill frame, for the
Clohessy-Wiltshire propagator. This frame is curvilinear along it’s tangential axis and can’t be transformed into an other frame. It’s orientation (seebeyond.frames.local) depends on the one used by the propagator.
Ground Stations
A ground station may be created using the create_station() function. This
will ensure correct frames conversions.
- beyond.frames.stations.create_station(name, latlonalt, parent_frame=<Frame 'ITRF'>, mask=None, equatorial=False)
Create a ground station instance
- Parameters:
name (str) – Name of the station
latlonalt (tuple of float) –
coordinates of the station, as follow:
Latitude in degrees
Longitude in degrees
Altitude to sea level in meters
parent_frame (Frame) – Planetocentric rotating frame of reference of coordinates.
orientation (str or float) – Heading of the station Acceptable values are ‘N’, ‘S’, ‘E’, ‘W’ or any angle in radians
mask – (2D array of float): First dimension is azimuth counterclockwise strictly increasing. Second dimension is elevation. Both in radians
- Returns:
TopocentricFrame
- class beyond.frames.stations.TopocentricFrame(name, orientation, center, mask=None)
Base class for ground station
- get_mask(azim)
Linear interpolation between two points of the mask
- visibility(orb, **kwargs)
Visibility from a topocentric frame
see
Propagator.iter()for description of arguments handling.- Parameters:
orb (Orbit) – Orbit to compute visibility from the station with
- Keyword Arguments:
start (Date) – starting date of the visibility search
stop (Date or datetime.timedelta)
step (datetime.timedelta) – step of the computation
events (bool, Listener or list) – If evaluate to True, compute AOS, LOS and MAX elevation for each pass on this station. If ‘events’ is a Listener or an iterable of Listeners, they will be added to the computation
Any other keyword arguments are passed to the propagator.
- Yields:
Orbit –
- In-visibility point of the orbit. This Orbit is already
in the frame of the station and in spherical form.
Lagrange Points
- beyond.frames.lagrange.lagrange(frame1, frame2, number, name=None, orientation=None)
Create a reference frame centred on Lagrange points
- Parameters:
frame1 (Frame) – Most massive object frame
frame2 (Frame) – Less massive object frame
number (int) – Lagrange point number (1 for L1, 2 for L2, …)
name (str) – Name of the frame created.
orientation (Orientation) – If
None, the created frame will be sinodic (i.e. oriented in QSW relative to frame2)
- Returns:
Centred on the specified Lagrange point.
- Return type:
Creating new frames
Creating new frames is done by creating Center and Orientation objects, and feeding them to Frame.
- class beyond.frames.frames.Frame(name, orientation, center, exists_warning=True)
Frame base class
- class beyond.frames.center.Center(name, body=None)
Center of a reference frame.
This may represent a celestial body center, or the location of a ground station, or an arbitraty point in space
- add_link(center, orientation, offset)
Attach the center to an already defined center.
For example when creating an earth ground station, the previously defined center should be Earth.
- Parameters:
center (Center) – Parent center
orientation (Orientation) – orientation of the offset relative to the parent center
offset (list or Orbit) – offset relative to the parent center
If ‘offset’ has a ‘propagate’ attribute, it is called to provide a moving offset.
- convert_to(date, new_center, orientation)
Compute the offset between to centers, in the given orientation.
- Parameters:
date (Date)
new_center (Center or str)
orientation (Orientation)
- Returns:
- cartesian coordinates of the center relative
to the new_center.
- Return type:
numpy.ndarray
- class beyond.frames.orient.Orientation(name)
Rotation matrix generator for frame transformation handling
- convert_to(date, new_orient)
Provide the rotation matrix to transform a vector in a given orientation (self) to another (new_orient)
- Parameters:
date (Date)
new_orient (str or Orientation)
- Returns:
6x6 rotation matrix
- Return type:
numpy.ndarray
- class beyond.frames.orient.LocalOrbitalOrientation(name, statevector, orient, parent)
Local Orbital Orientation
- class beyond.frames.orient.TopocentricOrientation(name, latlonalt, parent=<Orientation 'ITRF' at '0x79f5b38818b0'>)
Orientation for handling topocentric frames i.e. ground stations
Earth Orientation Parameters
IAU1980
Implementation of the IAU 1980 Earth orientation model
- beyond.frames.iau1980.earth_orientation(date)
Earth Orientation as a rotation matrix
- beyond.frames.iau1980.equinox(date, eop_correction=True, terms=106, kinematic=True)
Equinox equation in degrees
- beyond.frames.iau1980.nutation(date, eop_correction=True, terms=106)
Nutation as a rotation matrix
- beyond.frames.iau1980.precesion(date)
Precession as a rotation matrix
- beyond.frames.iau1980.rate(date)
Return the rotation rate vector of the earth for a given date
This rate is given in the pseudo-inertial frame (TOD)
- beyond.frames.iau1980.sideral(date, longitude=0.0, model='mean', eop_correction=True, terms=106)
Sideral time as a rotation matrix
IAU2000
Implementation of the IAU 2010 Earth orientation model
- beyond.frames.iau2010.earth_orientation(date)
Earth orientation as a rotating matrix
- beyond.frames.iau2010.precesion_nutation(date)
Precession/nutation joint rotation matrix for the IAU2010 model
- beyond.frames.iau2010.rate(date)
Return the rotation rate vector of the earth for a given date
This rate is given in the pseudo-inertial frame (CIRF)
- beyond.frames.iau2010.sideral(date)
Sideral time as a rotation matrix